출품기술
참가신청
상담신청
신청확인
Login
Join us
출품기술
참가신청
상담신청
신청확인
[전시기술] 자가학습 기반의 주행 가능성을 평가하는 이동 로봇
기술개요
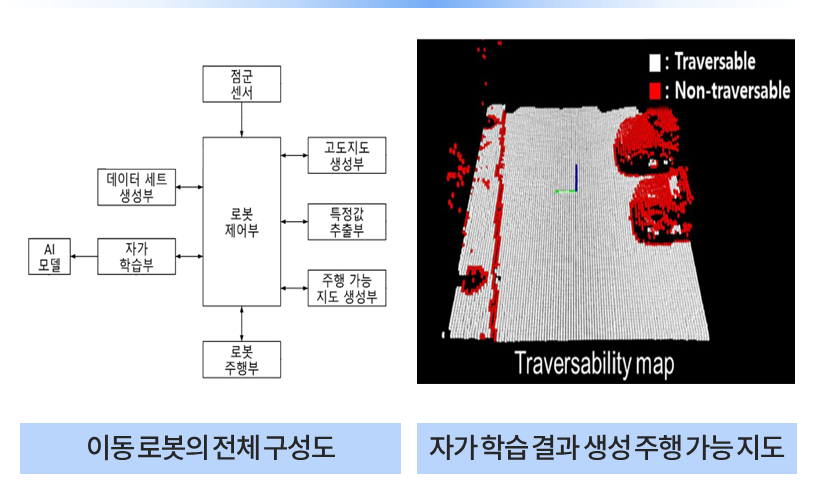
3D LiDAR 등 점군 데이터를 활용하여 고도지도를 생성하고, 격자별 지형 특징값을 추출 한 뒤, 자가 학습 기반 AI 모델로 주행 가능성을 평가하는 이동 로봇 기술레이블 데이터와 언레이블 데이터 세트를 혼합 활용하는 자가 학습 구조를 적용하여 주행 안정성과 효율성을 동시에 만족하는 주행 가능성 평가 구현
특허정보
특허명
출원번호(등록번호)
자가 학습 기반의 주행 가능성을 평가하는 이동 로봇
KR 10- 2020-0185906
기술소개서 다운로드
기술개요
3D LiDAR 등 점군 데이터를 활용하여 고도지도를 생성하고, 격자별 지형 특징값을 추출 한 뒤, 자가 학습 기반 AI 모델로 주행 가능성을 평가하는 이동 로봇 기술
레이블 데이터와 언레이블 데이터 세트를 혼합 활용하는 자가 학습 구조를 적용하여 주행 안정성과 효율성을 동시에 만족하는 주행 가능성 평가 구현
기술의 차별성
단순 지도 학습 방식이 아닌 자가 학습 기반 데이터 레이블링 기법을 적용하여 레이블 데이터 부족 문제를 해결
주행 가능·불가능 ·보류 영역으로 격자를 분류해 학습 데이터를 반복적으로 갱신하여 보다 정밀한 주행 가능성 평가 구현
다양한 지형 환경에서 훈련 데이터의 생성 ·갱신 ·활용을 자율적으로 수행할 수 있다는 점에서 기존 지도학습 기반 기술 대비 차별성을 가짐
응용분야
서비스 로봇 (실외 배송 로봇, 안내 로봇, 경비·순찰 로봇)
자율 주행 차량 및 특수 로봇 (도시형 자율주행차량, 국방·재난 구조용 로봇)
시장동향
글로벌 서비스 로봇의 시장 전망
글로벌 서비스 로봇 시장 규모는 2023년 437억 달러에서, 연평균 성장률 15%로 성장하여 2030년에는 1,030억의 규모에 달할 것으로 전망됨
특히, 물류·배달 ·경비 분야에서 실외 주행 관련 기술의 수요가 빠르게 증가
기술완성도
TRL
01
기초이론/실험
TRL
02
실용 목적의 아이디어/특허 등 개념 정립
TRL
03
연구실 규모의 성능 검증
TRL
04
연구실 규모의 부품/시스템 성능 평가
TRL
05
시제품 제작/성능 평가
TRL
06
Pilot 단계 시작품 성능 평가
TRL
07
Pilot 단계 시작품 신뢰성 평가
TRL
08
시작품 인증/표준화
TRL
09
사업화